-untuk mengetahui apa itu Fuzzy Inference System
-untuk mengetahui proses dari Fuzzy Inference System
2.Alat dan Bahan (Kembali)
tidak ada alat dan bahan digunakan
3.Dasar Teori (Kembali)
Fuzzy Inference System
Sistem fuzzy dari pengetahuan suatu sistem dengan cara ditransfer ke dalam
perangkat lunak yang selanjutnya memetakan suatu input menjadi output
berdasarkan IF-THEN rule yang diberikan disebut dengan Fuzzy Inference System
(FIS). FIS telah berhasil diaplikasikan dalam berbagai bidang seperti kontrol
otomatis, klasifikasi data, analisis keputusan dan sistem pakar.
FIS bisa dibangun dengan dua metode, yaitu metode Mamdani dan metode Sugeno.
Kedua metode hanya berbeda dalam cara menentukan harga output FIS. Metode
Mamdani adalah metode yang paling sering dijumpai ketika membahas
metodologi-metodologi fuzzy. Mamdani menggunakan sekumpulan IF-THEN rule
yang diperoleh dari operator/pakar yang berpengalaman.
Keluaran FIS tipe Mamdani berupa fuzzy set dan bukan sekedar invers dari fungsi
keanggotaan output. Dengan kata lain, untuk menghitung harga keluaran dari suatu
IF-THEN rule, metode Mamdani harus menghitung luas di bawah kurva fuzzy set
pada bagian keluaran (THEN-part). Selanjutnya dalam proses defuzzifikasi, metode
Mamdani harus menghitung rata-rata (centroid) luas yang diboboti dari semua
fuzzy set keluaran dari semua rule, kemudian mengisikan rata-rata tersebut ke
variabel keluaran FIS. Namun, dalam banyak kasus, akan jauh lebih efisien jika
menghindari menghitung luas di bawah kurva fuzzy set keluaran. Sebagai gantinya,
bisa menggunakan single spike sebagai fungsi keanggotaan keluaran. Fungsi
keanggotaan keluaran demikian dikenal dengan fungsi keanggotaan singleton dan
bisa dianggap sebagai sebuah pre-defuzzified fuzzy set. Pendekatan demikian jauh
lebih menghemat waktu komputasi daripada metode Mamdani standar yang
mengharuskan penentuan centroid sebelum proses defuzzifikasi. Pendekatan ini
didukung dalam FIS tipe Sugeno. Secara umum, FIS tipe Sugeno dapat
diaplikasikan pada sembarang model inference system dimana fungsi keanggotaan
keluaran adalah konstan atau linier.
1.Contoh Kasus
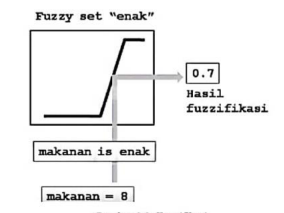
FIS mengambil masukan-masukan dan menentukan derajat keaggotaannya dalam
semua fuzzy set menggunakan fungsi keanggotaan masing-masing fuzzy set.
Operasi Fuzzy Logic
Operasi fuzzy logic perlu dilakukan jika bagian antecedent terdiri dari lebih dari
satu pernyataan. Hasil akhir dari operasi ini adalah derajat kebenaran antecedent
berupa bilangan tunggal. Bilangan ini nantinya diteruskan ke bagian consequent..
Masukan operator fuzzy adalah dua atau lebih derajat keanggotaan dari
variabelvariabel input. Keluarannya berupa nilai kebenaran tunggal. Operator fuzzy
untuk melakukan operasi AND and OR bisa dibuat sendiri. Namun biasanya dengan
memakai fungsi min dan max sudah mencukupi untuk berbagai keperluan.

Implikasi
Implikasi adalah proses mendapatkan consequent/keluaran sebuah IF-THEN rule
berdasarkan derajat kebenaran antecedent. Namun ketika rule diberi bobot maka
keluaran IF-THEN rule juga harus dikalikan dengan bobot tersebut. Semakin besar
bobot rule berarti semakin besar efek rule tersebut pada keluarannya. Setelah setiap
rule diberi bobot, proses implikasi baru bisa dilakukan. Implikasi dilakukan pada
tiap rule. Masukan dari proses implikasi adalah derajat kebenaran bagian antecedent
dan fuzzy set pada bagian consequent. Implikasi akan mengubah bentuk fuzzy set
keluaran yang dihasilkan dari consequent. Dua fungsi yang sering digunakan dalam
proses implikasi adalah min dan prod (product, menskalakan fuzzy set keluaran).

Agregrasi
Setelah keluaran setiap IF-THEN rule ditentukan (yaitu berupa sebuah fuzzy set
keluaran yang sudah diboboti) pada tahap implikasi, maka tahap selanjutnya adalah
melakukan proses agregasi, yaitu proses mengkombinasikan keluaran semua IFTHEN rule menjadi sebuah fuzzy set tunggal. Jika bagian consequent terdiri lebih
dari satu pernyataan, maka proses agregrasi dilakukan secara terpisah untuk tiap
variabel keluaran IF-THEN rule.
Pada dasarnya, agregasi adalah operasi fuzzy logic OR dengan masukannya adalah
semua fuzzy set keluaran dari IF-THEN rule. Tiga fungsi yang sering dipakai dalam
agregasi adalah max, probor (probabilistic OR), dan sum (menjumlahkan semua
fuzzy set keluaran).

Defuzifikasi
Kalau masukan dari fuzzifikasi adalah sebuah bilangan tunggal (yaitu harga
variabel masukan dan keluarannya adalah derajat keanggotaan dalam suatu fuzzy
set dalam antecedent, maka masukan dan keluaran defuzzifikasi adalah
kebalikannya. Masukan defuzzifikasi adalah sebuah fuzzy set (dalam hal ini fuzzy
set hasil agregasi) dan keluarannya adalah sebuah bilangan tunggal untuk diisikan
ke sebuah variabel keluaran FIS. Ada beberapa versi jenis bilangan tunggal yang
dimaksud tersebut. Mungkin, yang paling populer adalah center of area atau
centroid di bawah kurva dari fuzzy set hasil agregasi. Cara menghitungnya adalah
sama seperti menghitung pusat masa dari suatu kurva tertutup (centroid calculation)
(lihat Gambar 3.6). Metode lainnya yang bisa digunakan adalah bisector, middle of
maximum (rata-rata dari harga maksimum fuzzy set keluaran), largest of maximum,
dan smallest of maximum.
2 Diagram FIS

 Keluaran rule demikian bukan dalam bentuk fungsi keanggotaan, tetapi sebuah
bilangan yang mana berubah secara linier terhadap variabel-variabel input, yaitu
mengikuti suatu persamaan bidang z=av+bw+c. Jika b=0, FIS dikatakan berorder
satu dimana keluarannya mengikuti persamaan garis yaitu z=av+c. Jika a=b=0, FIS
dikatakan berorder nol, karena keluarannya berupa sebuah bilangan konstan, yaitu
z=c. Gambar 3.9 menunjukkan proses dalam FIS tipe Sugeno order nol. Gambar
3.9 menunjukkan proses dalam FIS tipe Sugeno order nol.
Proses defuzafikasi dalam FIS tipe Sugeno jauh lebih efisien daripada FIS tipe
Mamdani. Hal ini karena FIS tipe Sugeno menghitung nilai keluaran dengan cara
seperti berikut:
Keluaran rule demikian bukan dalam bentuk fungsi keanggotaan, tetapi sebuah
bilangan yang mana berubah secara linier terhadap variabel-variabel input, yaitu
mengikuti suatu persamaan bidang z=av+bw+c. Jika b=0, FIS dikatakan berorder
satu dimana keluarannya mengikuti persamaan garis yaitu z=av+c. Jika a=b=0, FIS
dikatakan berorder nol, karena keluarannya berupa sebuah bilangan konstan, yaitu
z=c. Gambar 3.9 menunjukkan proses dalam FIS tipe Sugeno order nol. Gambar
3.9 menunjukkan proses dalam FIS tipe Sugeno order nol.
Proses defuzafikasi dalam FIS tipe Sugeno jauh lebih efisien daripada FIS tipe
Mamdani. Hal ini karena FIS tipe Sugeno menghitung nilai keluaran dengan cara
seperti berikut: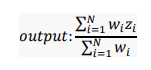
4.Percobaan (Kembali)
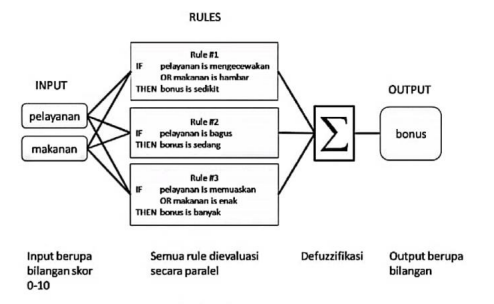
Proses dalam FIS tersusun atas semua diagram-diagram kecil yang perlihatkan
sejauh ini. Untuk lebih memudahkan dalam memahami proses yang terjadi dalam
FIS, Gambar 3.7 menunjukkan sebuah diagram singkat FIS. Perhatikan bahwa
proses dalam FIS dimulai dari masukan-masukan di bagian kiri bawah, kemudian
bergerak mengevaluasi semua rule secara paralel, dan kemudian
mengkombinasikan keluaran-keluaran semua rule untuk dijadikan keluaran tunggal
di bagian kanan bawah. Penggambaran diagram demikian adalah sebuah cara yang
sangat kompak untuk menunjukkan segala sesuatu yang terjadi dalam FIS dengan
sekali melihat saja, dari mulai fuzzifikasi variabel-variabel linguistik sampai proses
defuzzifikasi hasil agregasi.

3.FIS Tipe Sugeno
Sejauh ini kita hanya membahas FIS dengan tipe Mamdani. Tipe ini adalah tipe
standar yang paling umum dipakai. Tipe alternatif yang juga sering dipakai dalam
proses fuzzy inference adalah tipe Takagi-Sugeno-Kang atau FIS tipe Sugeno mirip
dengan tipe Mamdani. Proses fuzsifikasi, operasi fuzzy logic, dan implikasinya
adalah tidak ada bedannya dengan yang dipakai dalam FIS tipe Mamdani.
Perbedaannya terletak pada jenis fungsi keanggotaan yang dipakai dalam bagian
consequent. FIS tipe Sugeno menggunakan fungsi keanggotaan output yang bersifat
linier atau konstan. IF-THEN rule dalam FIS tipe Sugeno berbentuk seperti berikut:
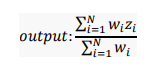
dimana 𝑤𝑖
, adalah hasil proses operasi fuzzy logic antecedent dan 𝑧𝑖 adalah
keluaran rule ke-i. Keluaran akhir, Output, tidak lain adalah sebuah weighted
average. Bandingkan dengan FIS tipe Mamdani yang harus terlebih dahulu
menghitung luas di bawah kurva fungsi keanggotaan variabel keluaran. Suatu
keuntungan dari FIS tipe Sugeno adalah bahwa dengan hanya order nol sering kali
sudah mencukupi untuk berbagai keper Sugeno dengan order lebih besar dari 1
adalah dengan membayangkan setiap TE-TIT proses operasi fuzzy logic antecedent
dan zadalah tan pemodelan. Sebuah cara paling mudah untuk memahami FIS rule
mewakili sebuah mode operasi yang “bergerak” (moving operating point).
Sementara sebuah rule dalam FIS Sugeno order nol (atau bahkan tipe Mamdani)
hanya mewakili sebuah mode operasi yang “diam”. FIS tipe Sugeno dengan order
1 atau lebih sudah mencukupi dalam pemodelan sistem-sistem nonlinier. FIS tipe
Sugeno mempunyai kemampuan untuk melakukan memodelkan sistem nonliner
dengan melalukan interpolasi antar model-model linier. Setiap model linier diwakili
dengan sebuah rule order 1 atau lebih.
4.Percobaan (Kembali)
tidak percobaan yang dilakukan
link video klik disini

Tidak ada komentar:
Posting Komentar